
RENO - Route Based ERS Network Optimization
Electrification, in particular Electric Road Systems (ERS) are viewed as a viable and necessary technology to meet Sweden’s ambitious transport sustainability goals. The objective of the RENO project is to provide, in form of maps and statistics, novel and complementary decision support for- and knowledge about which parts of the road network to electrify to maximize the network’s electrification utility given a set of freight routes (real or simulated).
Project Background and Aims
As the route based electrification utility of segments in a network are not independent of one another, but largely depend on which part of the routes include the segments, the RENO project will refine recently prototyped advanced route analytics and combinatorial network optimizations to take into account transport loads of routes, segment traversal speeds, 3D geometry (incline and potentially curvature) aspect of segments to find an optimized ERS network given an infrastructure development budget.
Summary of Results
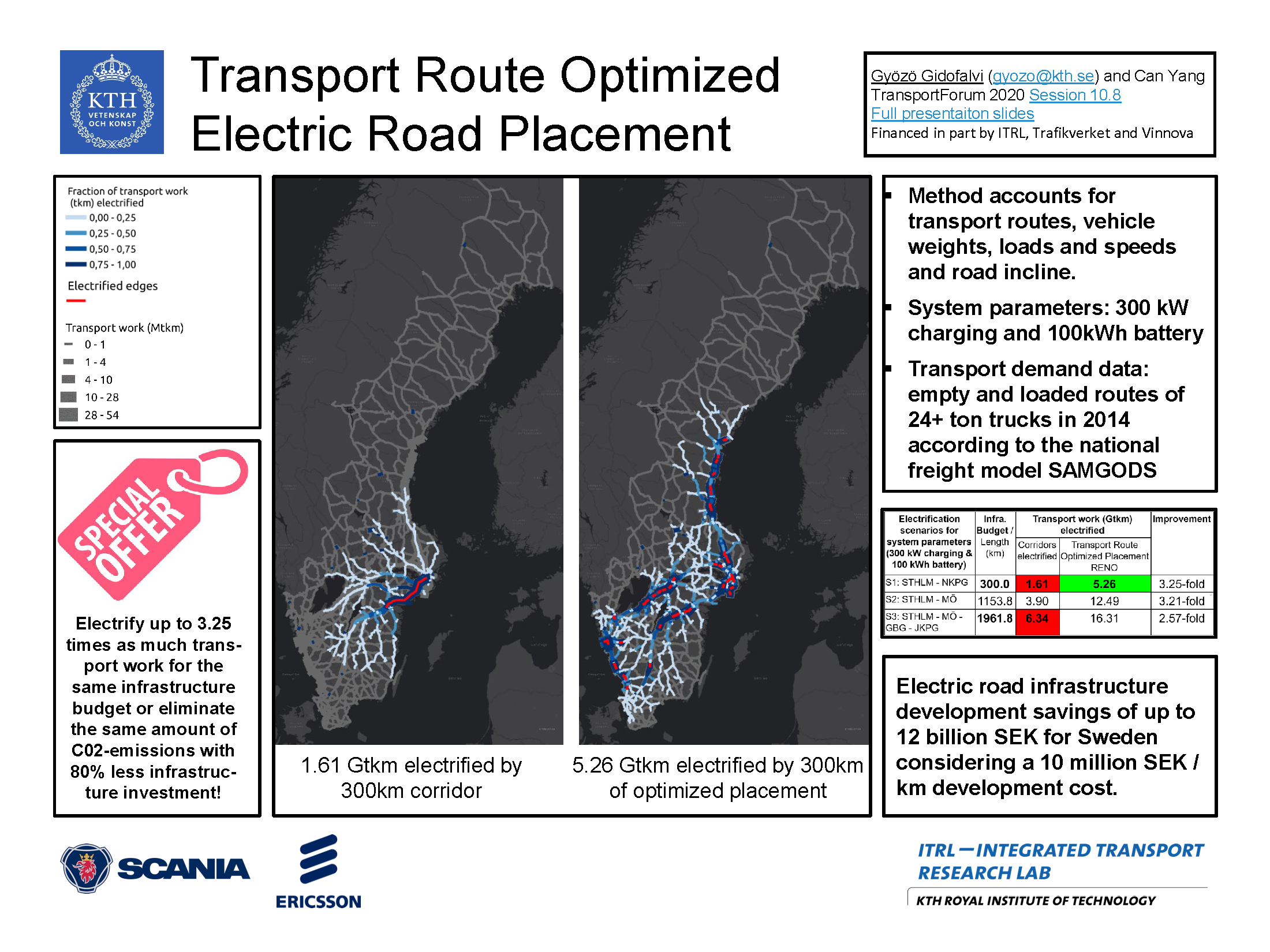
The large scale deployment of Electric Road Systems (ERS) is a viable pathway for reaching the emission reduction targets in- and environmental sustainability of the road-bound heavy freight sector. However, research in the RENO project shows that the placement of the electric roads is crucial. In particular, transport corridor concept based- and segment-statistics based placements are significantly inferior to the placements that are optimized based on the Route Based Electrification Utility (RBEU) concept that is developed in RENO. In particular, RBEU-optimized placements electrify up to 3.25 times as much transport work for the same infrastructure budget or eliminate the same amount of C02-emissions with 80% less infrastructure investment as corridor placement! Considering a conservative 1 M€ / km infrastructure development cost, these savings are estimated to be up to 1.2 B€ for Sweden. Results also show that the advantage of RBEU-optimized placement is more prominent for system settings with fast charging and small batteries. Furthermore, results also show that it important to model the energy consumption of vehicles in a way that takes into account the weight and speed of vehicles and the incline of the roads.
Publications / communications:
- G. Gidofalvi and C. Yang (2019) Delivery Route Based ERS Network Optimization. Conference paper and presentation at ERS 2019.
- G. Gidofalvi (2019) Trajectory and Mobility Based Services: A Research Agenda. Work-in-progress paper and presentation at LBS2019.
- G. Gidofalvi and C. Yang (2020) The potential of route based ERS network optimization. Extended abstract and presentation at TransportForum 2020.
- https://drive.google.com/open?id=19VSW4DWfvZYd20tGOpkHNFP3CyE7TFFP
- https://drive.google.com/open?id=1WLO-kXH7w2bMMfGZOb-kQTaIXb7EethZ
- G. Gidofalvi and C. Yang (2020) The potential of route based ERS network optimization. Conference paper and presentation at TRA 2020.
- C. Yang and G. Gidofalvi (2019) Transport Demand Optimized Electric Road Placement. PhD student / postdoc poster competition entry at Transformationdagen 2019.
- G. Gidofalvi and C. Yang (2020) Transport Demand Optimized Electric Road Placement. Extended abstract submission to ERSC 2020.
- Part of the 2020 IVA-100 R2B list: the Royal Swedish Academy of Engineering Science's Research2Business top 100 list for 2020: http://www.iva.se/projekt/research2business/ivas-100-lista-2020/gordian/
- Competition entry for KTH Climate Neutrality Innovation Challenge
- Presentations to project stakeholders and potential project partners: TripleF project pitch, SEC Cross-thematic conference, SEC Theme 5 members, ProColumbia, Beijing Municipal Institute of City Planning & Design (BMICPD), Scania, Volvo, SLL, Einride, and VOI.
- H. Hauska and G. Gidofalvi (2020) Elvägar i Sverige [Electric Roads in SWeden]. Kart & Bildteknik [Mapping and Image Science] 2020:1, pp. 26-27.
- Social media: https://www.linkedin.com/feed/update/urn:li:activity:6622162974104788992/
Acknowledgements
This work was in part funded by ITRL, the School of Architecture and Built Environment at KTH, as well as the Research and Innovation Platform for Electric Roads (“FoI-plattform för elvägar”).
Funding partners: Vinnova and the Swedish Transport administration, Trafikverket

