
REDO2 - Remote automated vehicle operation 2
The main results from REDO2 will be prerequisites, tools, methods, and demonstrations of remote operation of road vehicles. Furthermore, the project includes comprehensive studies to give valuable scientific results on operational requirements of remote operation and its complex interaction within the systems, as well as advice and overview on regulation and laws.
Background
Although automated vehicles have been developed rapidly in recent years, there are still many challenges to realize the full driving automation (SAE’s Level 5). These challenges could be, for example, caused by the unexpected or unusual conditions on roads such as adverse weather, construction sites, obsolete maps, public events, sensor failure, traffic accidents, etc. Remote operation enables a human remote operator to support a connected and automated vehicle(s) from a distance when failures or unexpected events occur. Furthermore, this allows a remote operator to act as a safety driver during the testing phases of such vehicles, that may not be equipped with a driver’s compartment. Hence, remote operation could be an approach for speeding up the transition toward the commercialization of automated vehicles in a safe and efficient way.
The SAE J3016 standard from April 2021 defines and categorizes remote operation into different modes. In this project, we consider three modes of remote operation, based on the SAE’s definition:
1) remote driving, where a remote operator acts as a driver and conducts dynamic driving tasks.
2) remote assistance, where a remote operator assists automated driving systems with commands such as approval to overtake the obstacle or issuing new waypoints.
3) remote supervision, where a remote operator only supervises automated vehicles without giving specific commands to the vehicles.
A person who remotely operates a vehicle(s) in these modes are then considered a remote operator performing different tasks described above.
Remote operation has been recently implemented and used in a confined area such as a warehouse, e.g., remote operation of forklift provided by Phantom Auto. However, deploying remote operation on public roads comes with several technical and non-technical challenges.
Some of these challenges have been investigated in previous and ongoing projects (e.g., HAVOC1, CORD2, REDO1 , AVTCT1 & 2/3, CAT4 ), where different aspects of remote operation were investigated.
Aim
- RQ1: Which soft (human, organization) and hard (tech) sub-systems are core for remote operation and how can the relations between these sub-systems be defined?
- RQ2: How can we ensure that systems-of-systems (tech, humans, organizations) communicate unambiguously and exchange information between each other, i.e., share both data and their meaning (semantics)?
- RQ3: What are the methodologies and metrics that best quantify the performance of remote operators?
- RQ4: What kind of information do operators need to safely operate vehicles from a distance?
- RQ5: How should the information be presented to create situational awareness for the remote operator, especially when switching between different operating modes and when operating several vehicles?
- RQ6: Would the lateral and longitudinal assisted control system for the remote operator effectively guarantee the safety of the vehicle and improve the driving smoothness and riding comfort?
- RQ7: How would the cognitive performance of operators be affected by the help of assisting functions?
- RQ8: How can assisting control functions be implemented to give smooth operation of the vehicle?
- RQ9: What are the legal challenges of the three modes of remote operation (remote driving, remote assistance, remote supervision)?
- RQ10: To which extent do existing international and national regulatory initiatives take the legal challenges into account and how should such challenges be addressed in future regulation to best deal with safety concerns and support remote operation?
- RQ11: How shall remote operation be treated in terms of operator working hours, breaks, and safety routines for professional remote operators?
Methodology
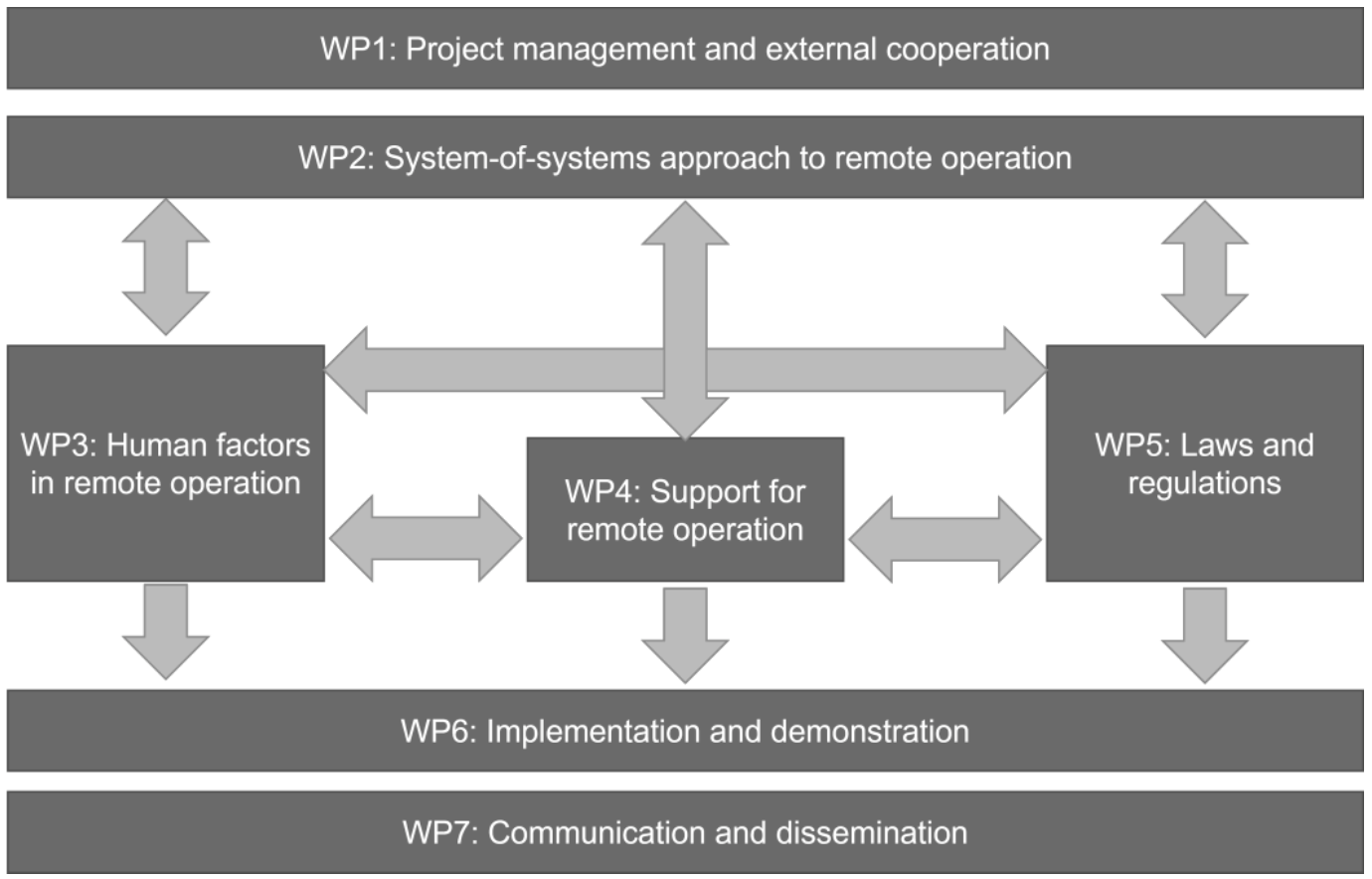
We structure the work into different work packages (WPs). Each WP contains parallel tasks that cover several aspects within the scope of respective WP. This allows the team to also deepen the understanding and learning in each specific area. The image below presents all WPs of the project. WP1 and WP7 concern administration, communication, and dissemination of the project. WP2 analyses remote operation from a system-of-systems perspective, providing overarching requirements and use cases within each target application area, which will be common for the project. Majority of research activities are then distributed among the three main research topics: human factors (WP3), supporting functionality (WP4), and laws and regulation (WP5). Lastly, results will be implemented and demonstrated in WP6.
Expected results
The main results from the project will be toolchain, methods, implementation, and demonstrations of remote operation of vehicles. The results will also include comprehensive analysis that will provide valuable scientific results on operational requirements on the system-of-systems for remote driving, as well as advice and overview on regulation and laws.
These results will be disseminated by means of open-access scientific publications and public reports. Moreover, the results will be implemented and demonstrated as a public demonstration at the end of the project.