
ISMIR - Investigating Sidewalks’ Mobility and Improving it with Robots
The ISMIR project investigates how sidewalk robots can improve city logistics by optimizing short-range trips and delivery methods, as well as gathering data to enhance pedestrian mobility. By integrating machine learning and predictive models, it aims to develop smarter routing solutions and ”walkability” indicators for better urban planning.
Sidewalk robots appear to be a promising solution for City Logistics. Hubs, retail locations, and even retrofitted vehicles might dispatch them for short-range trips and partially replace standard, less sustainable delivery methods. In addition, last-mile delivery operations could benefit from decreased operating expenses (e.g., drivers) and fewer traffic-dependent routes.
While preliminary tests run by high-tech companies worldwide (e.g., Amazon, DHL, UPS, Uber) are making the headlines, little is known regarding sidewalk robots' planning and operation challenges. Another unexplored and relevant research topic is the possibility of leveraging robots' navigation data and other collected measurements during their trips to understand and plan pedestrian mobility in cities. The ‘Investigating Sidewalks’ Mobility and Improving it with Robots’ (ISMIR) project will address these two aspects.
The ISMIR project aims to develop innovative routing solutions for sidewalk delivery by leveraging empirical findings from actual trips and accounting for the various uncertainties that can impact trip efficiency. This will involve integrating prediction models and machine learning methods to discover more effective solutions.
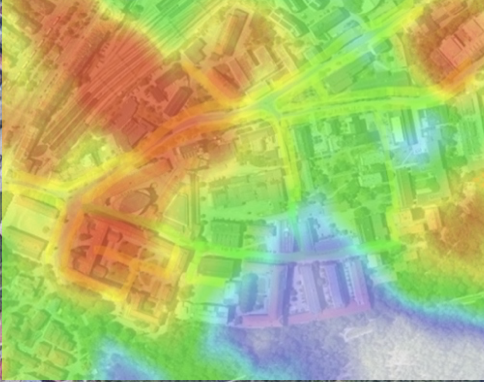
In addition, the project will investigate sidewalk navigation challenges to explore pedestrian infrastructure and its utilization with an innovative data collection approach. This will lead to the development of "walkability" key performance indicators (KPIs) to describe the mobility conditions and help identify measurable criteria for improved decision-making in different fields such as City Logistics, Transportation Planning, and Urban Design.
The ISMIR project's ultimate goal is to better understand the upcoming changes in urban transportation systems and identify innovative ways to foster a sustainable evolution of the public space.