MUST - methods for Managing deep Uncertainty in planning for Sustainable Transport
The accelerating technological development mean that long-term foresight about the transport system is associated with deep uncertainty. In MUST, transport planning challenges characterized by deep uncertainty will be identified and tools and methods will be developed to provide decision support for the design of more robust strategies for a sustainable future transport system.
Background
The accelerating technological development and societal change mean that long-term foresight about the transport system is associated with deep uncertainty. Also, the needs to analyze the impacts of new transport technologies is increasing since it is a key factor for making informed decisions on introducing, or adjusting, policy instruments or to make other interventions aiming to steer the development towards the transport political goals and sustainability targets. To address these challenges, there is a need for complementing tools in the form of models and decision support systems that enables analysis of how the uncertain development may play out and that allows assessments of candidates for investments, interventions or policies against a large set of future scenarios. This is in contrast to traditional forecasting- and planning method which is primarily based on deriving a plan based on a single, or small-set of, forecasts of the future transport system with the help of a detailed and heavy transport model.
Aim
The aim with the MUST project is to improve the ability of Trafikverket and other actors involved in the planning of the future transport system, to manage deep uncertainty in long-term analysis and planning. The MUST project has four overarching goals:
-
Increase the awareness and knowledge level on available approaches for analyzing uncertainty and robustness in long-term planning and in Trafikverket and the Swedish planning community.
-
Develop and demonstrate tools and models for analysis of investments, interventions or policies under deep uncertainty as a complement to Trafikverket’s existing forecasting models.
-
Build knowledge on how the technological development, with automated driving in focus, may affect the transport system during the coming 20-30 years considering the substantial uncertainties surrounding it and to assess the needs for policy instruments and interventions based on how the development unfolds.
-
Build competence in research and practice for future transport planning.
The approach in MUST is to apply and develop tools and methods based on the research frontier within Decision Making under Deep Uncertainty (see Marchau et al. 2019) and Exploratory Modeling and Analysis (EMA) (see Kwakkel and Pruyt 2013) to transport planning issues in a Swedish context.
Activities
The project consist of two phases. In the first phase, a broad assessment of the needs for managing deep uncertainty in Swedish transport planning will be made through a literature review, workshop series and a case study on the robustness of the proposed policy strategies for reaching the climate targets for the domestic transport sector. The second phase will be focused on developing tools and models for making (policy) analysis of the future Swedish freight transport system when accounting for technological and societal uncertainty, with a focus on driverless vehicles.
Phase 1 2021 Q3 – 2023 Q1
WP 1 Literature review and workshop series with Trafikverket on decision making under deep uncertainty. Identify planning topics characterized by deep uncertainty, how these can be addressed and specify research and development needs.
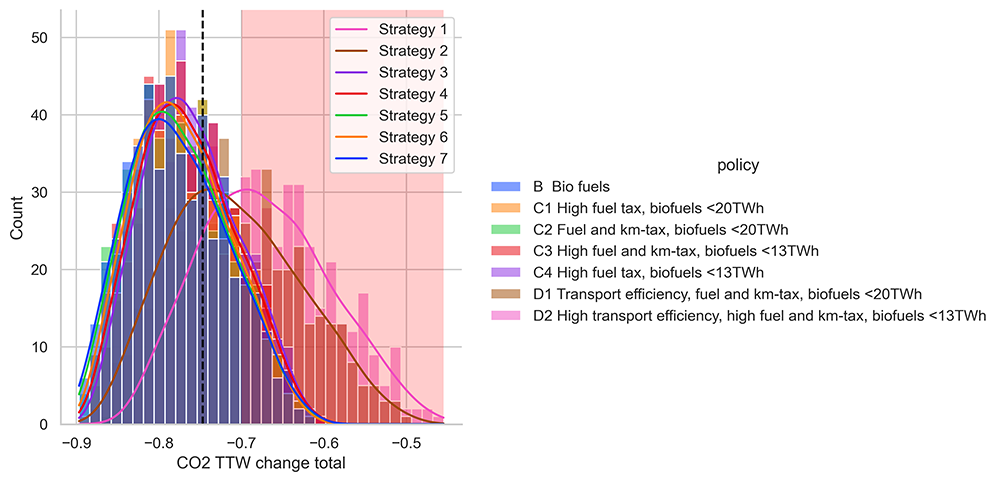
WP 2 Robustness analysis of the proposed strategies for reaching the climate targets for domestic transport. This will be based upon Trafikverket’s previous work with developing goal-fulfilling scenarios for how the climate targets can be met. We will base our analysis on the same tool that Trafikverket and couple it with state-of-the art EMA tools to analyze the robustness of the proposed strategies, under what conditions they fail, and assess whether there are more robust strategies that are feasible.
Phase 2 2023 Q2 – 2024 Q2
WP 3: Study on driverless vehicles and sustainable freight transport. Previous research has indicated that driverless trucks could have a substantial impact on the freight transport system in terms of transport costs, modal split, and demand (Engholm, Kristoffersson, and Pernestal 2021). However, there is significant uncertainty about if, when and how fast a large-scale introduction of driverless trucks could take place, and its impacts are highly dependent on how other uncertain technological and societal trends play out. Therefore the impacts of driverless vehicles on the sustainability of the freight transport sector is highly uncertain which means that the needs for policy instruments may differ substantially on how the technological development plays out. In this work package, a dynamic, lightweight system-model of the Swedish freight transport system will be developed to analyze the impacts of driverless trucks and other emerging freight transport technologies in a large set of plausible future scenarios. Furthermore, currently proposed policy instruments will be evaluated and, if needed, new candidates for more robust policy instruments will be identified.
Methodology
In addition to literature reviews and workshop, the main methodology in the project is Exploratory Modeling and Analysis (EMA) and other associated methods from Decision Making under Deep Uncertainty.
EMA is an approach for model-based analysis of complex system under uncertainty. In contrast to predictive modeling where the goal is to make a precis forecast on the system based on a set of well-specified inputs, EMA is about systematically explore the behavior of the system by sampling the whole space of uncertainties in model parameters and decision variables. Typically, this require a very large set of scenarios (in the order of thousands) which means that EMA requires fast and flexible models.
The typical process for an EMA study is to; 1) specify external uncertainties (X), decision options or policy strategies (L) and the outcome metrics (M) of interest; 2) create scenarios by sampling from the combined set of X and L; 3) calculate the outcomes (M) for all scenarios by the use of a system model (R) and save these in a database; 4) analyze the database – what scenarios generates the desired outcomes? This analysis is often based on a combination of conventional statistical and data visualization tools and machine-learning and data mining methods.
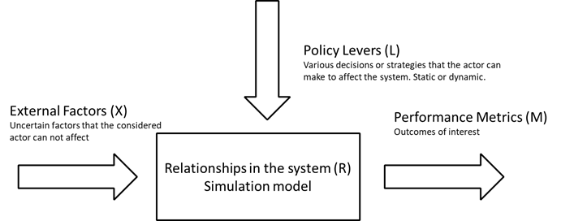
Figure 1. A framework for Exploratory Modeling and Analysis.
EMA can be used for various types of analyses. Some typical examples are:
-
Understand what outcomes are feasible given an uncertainty space. Example of analysis question: how can driverless trucks impact the demand for road freight transport in 2040 depending on uncertainties in: market penetration rate, impact on transport costs and the relationship between transport cost and transport demand?
-
Identify what factors have the largest impact on the system’s behavior and outcomes of interest. Example of analysis question: what uncertainties can have the largest impact on the change in CO2 emissions from the transport system until 2030?
-
Identify what combinations of inputs (i.e. regions in the uncertainty and decision space) that gives a certain outcome. Example of analysis question: in what scenarios do different strategies for reaching the climate targets succeed?
-
Robustness- and vulnerability analysis. Example of analysis question: how appropriate is a policy for large use of biofuels for the road transport sector in scenarios with various degrees of electrification rates of the vehicle fleet?
For several reasons, of which long run-times, manual set-up and large data are some, it is not practically feasible to perform EMA using conventional detailed transport models. Therefore, faster and more flexible models are required for EMA. This does often also mean less detailed models. However, conventional models can be used at a later stage in the analysis process to do detailed analysis of a smaller set of interesting scenarios identified using EMA. EMA is therefore a complement rather than competitor to conventional transport models.
References
Engholm, Albin, Ida Kristoffersson, and Anna Pernestal. 2021. “ Impacts of Large-Scale Driverless Truck Adoption on the Freight Transport System. ” Transportation Research Part A: Policy and Practice 154 (December): 227–54.
Kwakkel, Jan H., and Erik Pruyt. 2013. “ Exploratory Modeling and Analysis, an Approach for Model-Based Foresight under Deep Uncertainty. ” Technological Forecasting and Social Change 80 (3): 419–31.
Marchau, Vincent A. W. J., Warren E. Walker, Pieter J. T. M. Bloemen, and Steven W. Popper, eds. 2019. Decision Making under Deep Uncertainty: From Theory to Practice. Cham: Springer International Publishing.
Illustration