Here you will find a selection of our ongoing projects
COBALT
The COBALT project develops a formal framework that enables autonomous vehicles, infrastructure, and cloud services to automatically negotiate, verify, and enforce safe cooperation through Behavior-Level Agreements (BLAs).
The DREAM project focuses on design and deployment of remote operation technology to assists in operation of connected and automated vehicles (CAVs) by applying all previous results in real-word contexts.
E-charge 2 is a project aiming to accelerate the transition to zero-emission long-distance truck transport by demonstrating a large-scale electrified logistics ecosystem, including vehicles, high-power charging infrastructure, and efficient truck stop solutions.
Image: DALL·E 3 by prompt: “Digital chess board where the figures are electrical construction equipment (charger, battery, solar cell, excavator, front loader) and some of the fields have piles of material (rocks, sand), dug out holes and buildings under construction.”
The EFFECT project develops a digital twin of electrified construction site resources, processes and dependencies to assess the costs and benefits of best-practice electrification, demonstrated in a 1,200-apartment urban renewal project in Södermalm, Stockholm.
The HITS project develops, implements and scales solutions for sustainable, secure and seamless deliveries, uniting stakeholders across the electrified long-distance transport value chain to enable efficient deployment and broad industry adoption.
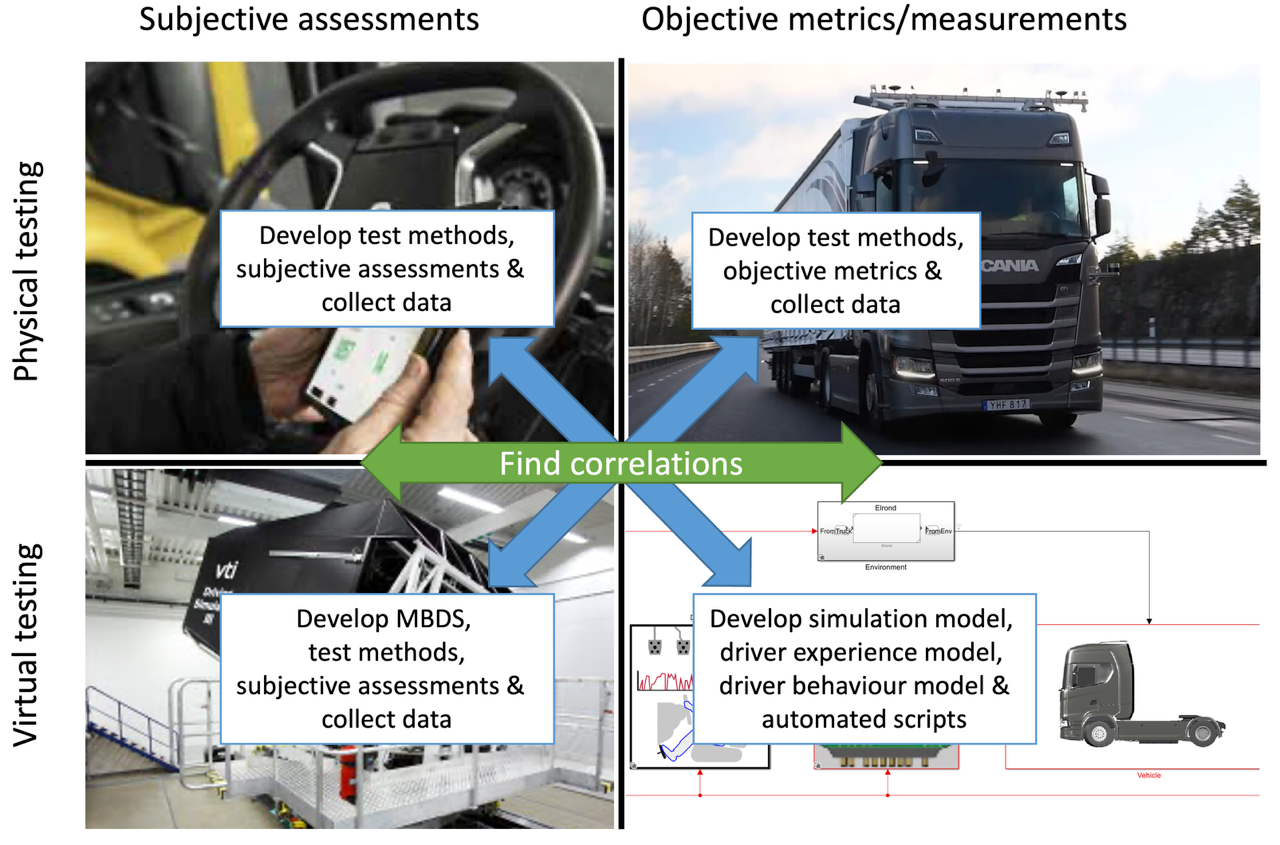
Picture showing four fields, horizontal: virtual testing, physical testing and vertical: subjective assessment, objective metrics. The project will work on finding methods and correlations between these.
The PREDICT project develops early-stage tools and methods to assess energy consumption, performance, and drivability of new fossil-free powertrains, ensuring efficient longitudinal control without compromising driver and passenger comfort.
The Powering freight: Dynamics of transport & energy project develops a System Dynamics model to analyse interdependencies between electric road freight and the evolving low-carbon electricity system, identifying bottlenecks and leverage points to guide coordinated policy and investment decisions for achieving net-zero emissions by 2050.
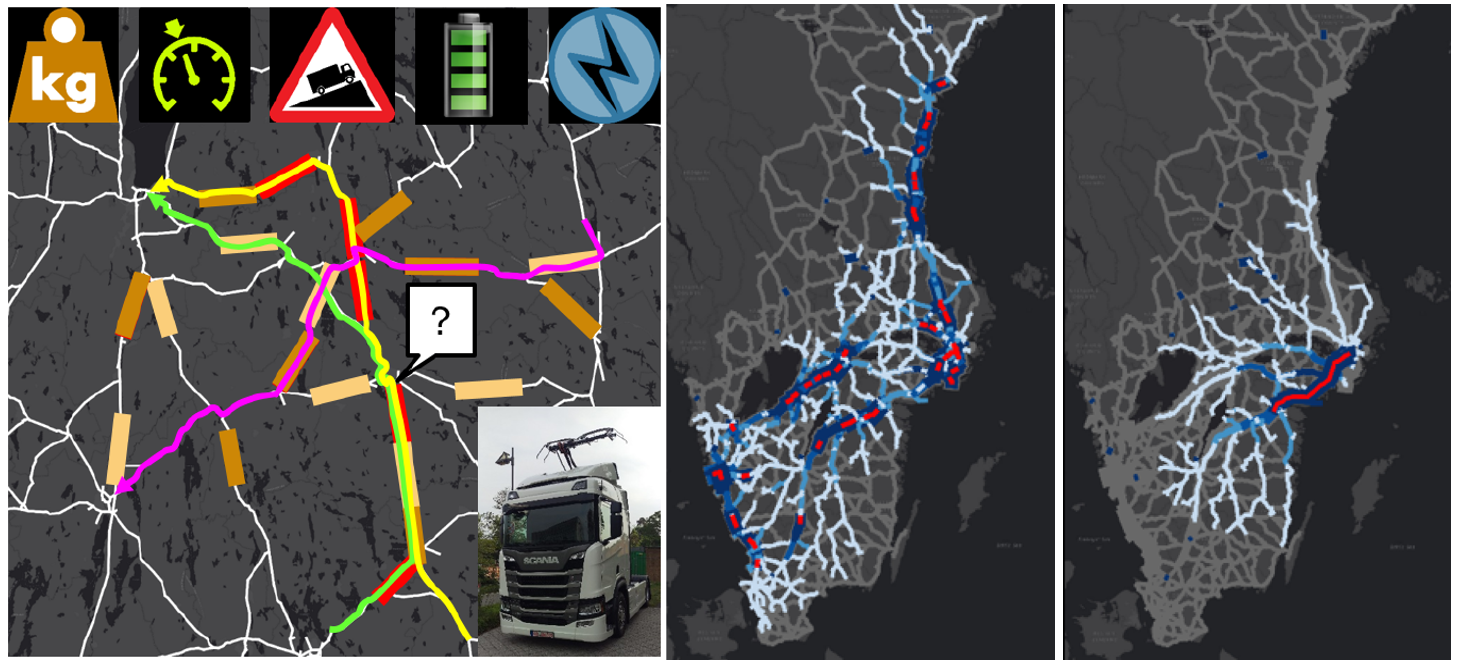
The SIZE project develops a simulation environment to support well-informed decisions on electrifying forestry road transport, providing guidance on suitable battery sizes for different operations and on planning efficient charging infrastructure.
The SLICE-T project develops an interference-aware framework for power- and bandwidth-constrained cellular networks for transport and connected vehicle systems, jointly optimizing user association, resource allocation, and transmit power to improve reliability, throughput, fairness, and energy efficiency in mobility-driven, interference-limited environments.
The STIFF project examines how fault-handling systems in driverless transport can be redesigned to maintain high vehicle uptime by transforming roles, interactions and decision processes, and by developing intelligent decision support using a systemic design approach.
The TRACER project is expected to accelerate the electrification of the heavy freight transport industry and the realization of the positive effects thereof by deriving transport electrification scenarios that maximize the benefit and minimize the cost of electrification for all stakeholders.
The TREE project addresses the societal challenge of enabling an efficient transition to electrified heavy road transport, with a specific focus on the forestry industry, which accounts for 20% of Sweden’s heavy road freight.
TrEff is a system dynamics model to understand the impact of electrification on road freight transport efficiency. This open and online interface allows the user to explore the results of the model in a dynamic way.