
Automated Vehicle Traffic Control Tower: Phase 2
In the Automated Vehicle Traffic Control Tower project we investigate the effects of automation on vehicle and traffic management of commercially operated fleets and public transport.
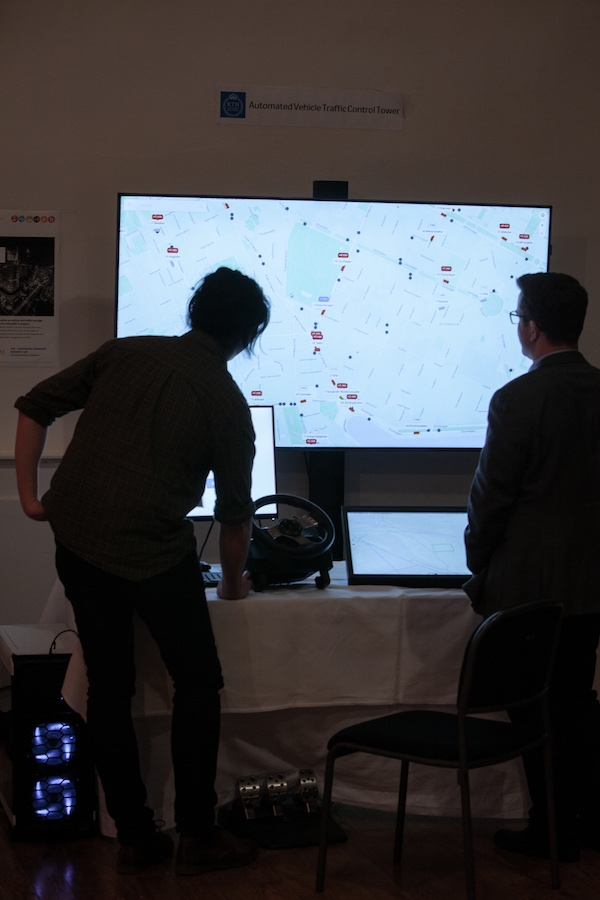
The goal of the project is to understand the role of a traffic control tower (TCT) for automated road vehicles (AVs). Such a control tower will be used for control and operations on vehicle, fleet and traffic levels, which all will be affected by the introduction of automated and driverless vehicles. In a joint effort by the Integrated Transport Research Lab and industry this project seeks to accelerate the research on a platform supporting the supervision, control and management of AV’s. In this study gaps, barriers and potential under different scenarios are identified.

The possibilities with self-driving vehicles are multiple, such as increased safety, more effective traffic, and development of new mobility services that replace private car ownership and contribute to shared travel. There are still several challenges to address when it comes to self-driving vehicles. In the long term, a system perspective in traffic and infrastructure management is needed to get the benefits of automated vehicles in the transport system. In a shorter term perspective, other challenges arise, driverless vehicles will need support to make decisions in complex and dynamic traffic situation while their sensor, algorithms, and technology are still under development.
Using the Automated Vehicle Traffic Control Tower could in the long term contribute to creating an effective transport system. Meanwhile, It could also assist driverless vehicles with difficult situations, making it possible to reap the benefits of self-driving vehicles earlier.

Conclusions from preliminary study
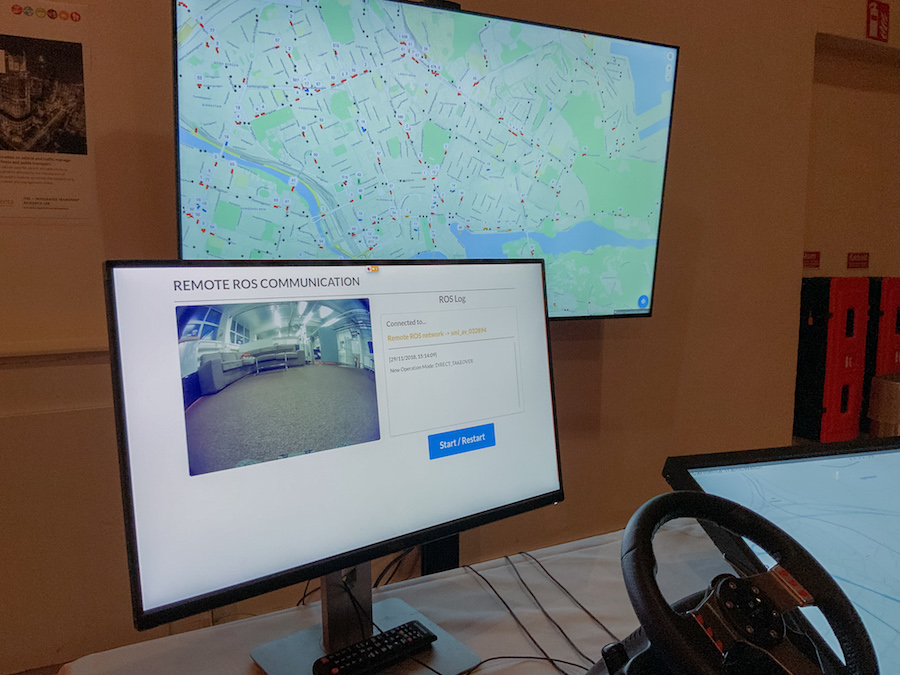
One conclusion from the preliminary study is that the control tower will play an important role in the development of an automated transport system, in short, medium and long term. There are many expectations and tasks for the AVTCT, including remote control of vehicles, vehicle fleet management, and regulations on which roads the vehicles are allowed to drive on. Several types of control towers will be needed with different tasks (eg vehicle manufacturers, vehicle owners, road maintenance, traffic management) that can work together in an ecosystem. This control system ecosystem can be seen as an application of "system of systems".
KTH Video of 5G Launch:

Project partners:
Integrated Transport Research Lab at KTH (coordinator), Mobile Services Lab at KTH, Asta Zero, Carmenta.
The project is funded by


Contact
If you have any question or remark about the AVTCT project, you can contact Rami Darwish, project leader for the AVTCT: rami.darwish@indek.kth.se