
VMaRS - Values of MaaS Based on Representative Scenarios
There are many ongoing initiatives and pilots taking place in many different contexts. These are important to gain knowledge about user acceptance, business models, and public/private stakeholders collaboration. However, the pilots are often relatively limited in terms of number of users, user groups, number of transport options and time period.
Background
MaaS deployment and outcomes vary by region. Some positive impacts have been found from some current studies that MaaS can encourage more sustainable travel. However, whether these impacts are marginal or significant is unclear as they are limited to pilot tests.
Aim
Knowledge of the potential impacts that MaaS could have on a large scale is crucial for policy and regulation decision-making in developing and implementing MaaS. The aim of this project is to provide potential values of MaaS by evaluating its impacts through future scenario analysis. The findings are expected to assist the proposed MaaS roadmap and adapt actions for MaaS development and implementation in Sweden.
Methodology
Since the project aims to provide the potential values of MaaS services and evaluate their impact, a scenario analysis approach has been employed. The scenarios assume that:


Furthermore, this approach recognises two strategic uncertainties:

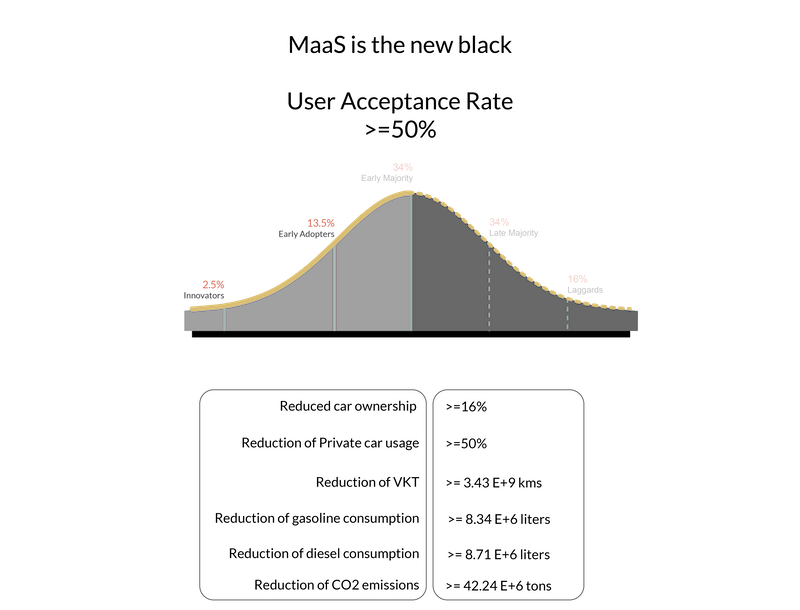
The following KPI:s are used:
Outcomes
The outcome of the scenario analysis was four different scenarios which can be seen below:
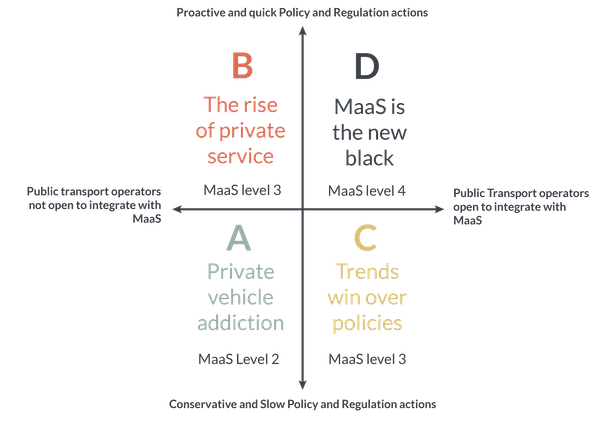
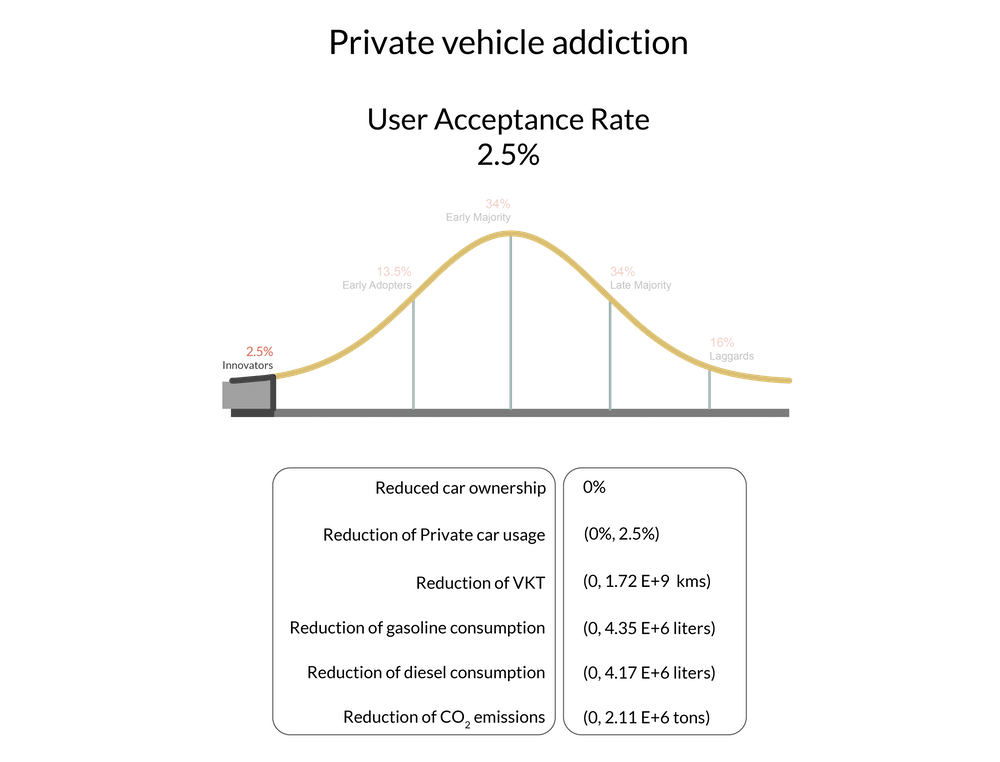
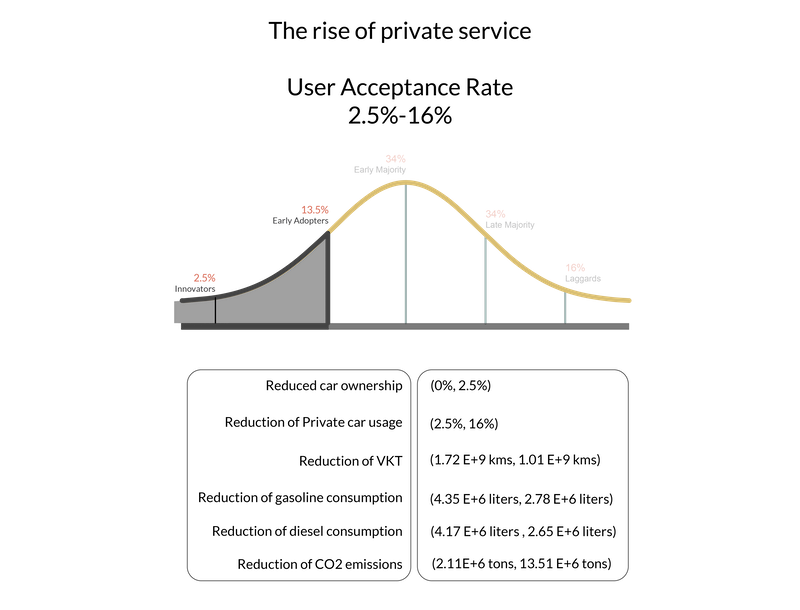
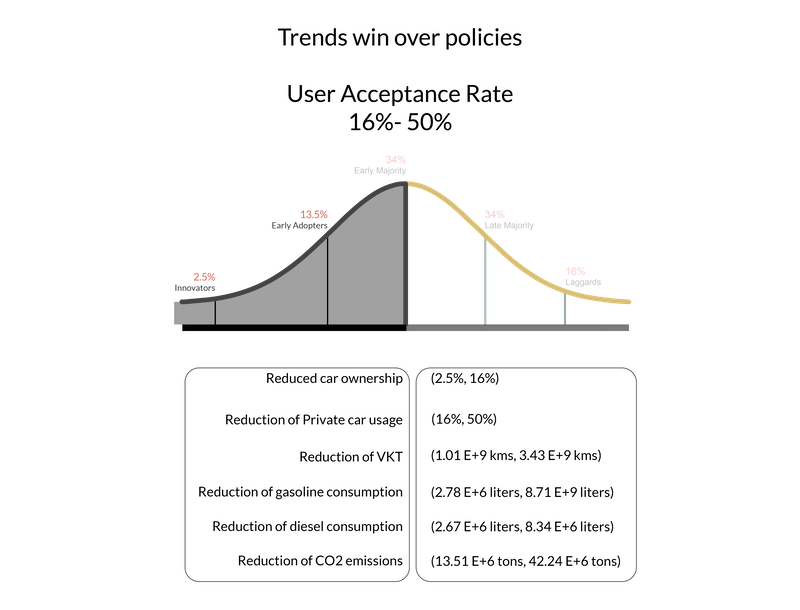
The results can be seen below, in which each figure corresponds to a different scenario and shows the effects that the scenario could have on different KPIs:
More information:
For more information, please feel free to contact the project leader Mia Xiaoyun Zhao .
Founded by:
