
System Level Impacts of Self-driving Vehicles
Self-driving vehicles might revolutionise the mobility of people and goods and the expectations on driving automation are sky high. However, their long-term impacts on the transport system and sustainability aspects remain uncertain.


Research questions
How will self-driving vehicles impact the Swedish transport system for passenger and freight transport in different future scenarios?
What role might self-driving vehicles have in a sustainable transport system?
Aim
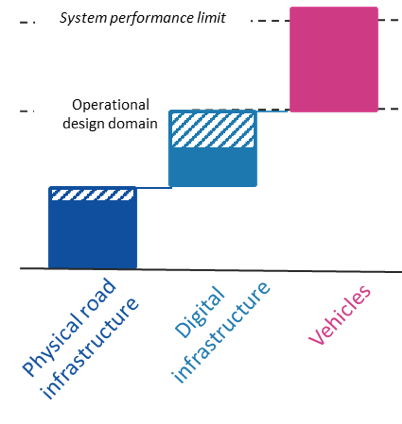
The project builds knowledge about how self-driving vehicles can contribute to a sustainable transport system and meet the challenges in the transportation system of tomorrow. Focus is on the interplay between self-driving vehicles and physical and digital road infrastructure. System level impacts in future scenarios are investigated with respect to parameters such as punctuality, capacity, robustness, usability, environment and health and safety. The aim is that the project findings is used improve the strategical and tactical planning at Trafikverket (the Swedish Transport Administration).
Background
Self-driving vehicles are shaping the transport system but also shaped by the transport system. There is existing research suggesting what the impacts of self-driving vehicles might be on energy efficiency, road safety, and traffic flows. The wider consequences of self-driving vehicle usage on e.g. transport behavior, net energy consumption, infrastructure design, mode choices, public health, land use, etc. are unknown.
As the national transportation infrastructure owner and developer, Trafikverket has the responsibility to ensure that the infrastructure enables a transportation system in line with the Swedish transport policy goals. Also (physical) transportation infrastructure investments are often inherently long term. Typically, appraisal periods for transport infrastructure in Sweden are between 40 to 60 years suggesting that knowledge about long term impacts of new technologies are important. The future transport system will likely be more integrated, and therefore more complex, with physical infrastructure, digital infrastructure and increasingly more automated and connected vehicles are collaborating.
Managing, planning and developing infrastructure for the transportation system is complex due to the many variables influenced by, and influencing its performance. In a complex system, like the transportation system, actions to improve or stabilize the system often fail. Decisions and interventions tend to create unanticipated side-effects since everything in the system is connected. Thus, to successfully manage the transition to a future transport system with self-driving vehicles, the potential direct and long-term systemic effects of self-driving vehicles must be understood. This is particularly important in relation to climate goals and other sustainability sustainability targets. There is a growing research literature indicating that improvements in efficiency by self-driving vehicles tend to generate more car traffic and associated emissions, therefore higher material use and increased congestion if not managed and governed properly.
Approach and method
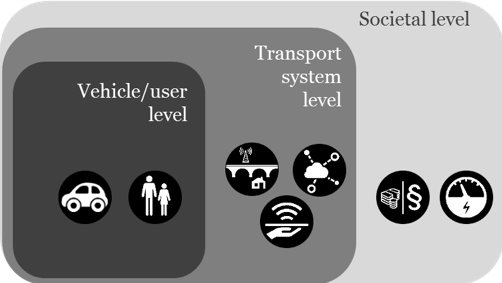
Integrated approach: impacts on different system levels requires different research methods.
Literature study
Focus is on reviewing literature on impacts on the vehicle/user level, existing simulation studies on impacts of self-driving vehicles and existing speculative scenario-based studies that addresses the large long-term development trends and societal impacts of self-driving vehicles.
Modelling and simulation of system-level impacts
Two types of complementary modeling approaches are used:
- Using existing transport models in which self-driving vehicles are implemented to model impacts on the transport system. Current study in which self-driving trucks are simulated by using the Swedish national freight transport model Samgods.
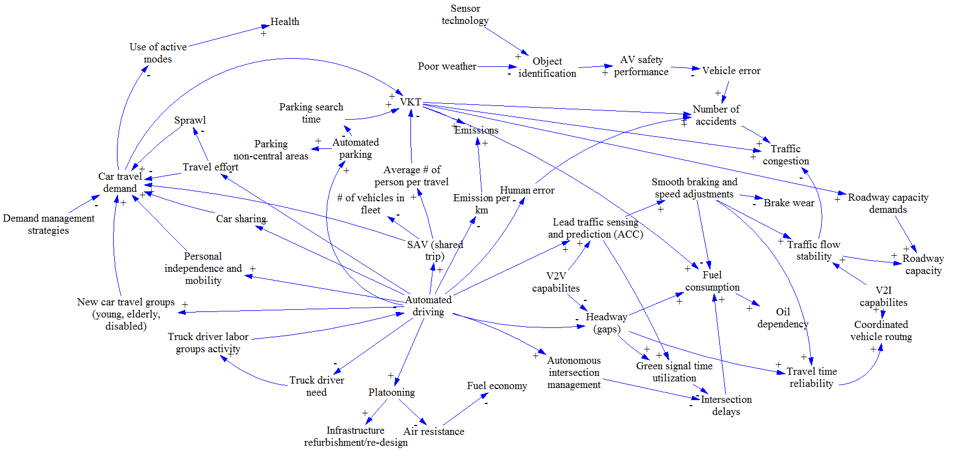
- Using conceptual modeling: since empirical data on self-driving vehicles is scarce, conceptual system analysis methods are used (e.g. causal loop diagrams) to understand complex, long term casual processes related to self-driving vehicles.
Study of pilot projects
The ambition in the project is to gather data and insights from pilot projects that Trafikverket intends to support or be involved in during the project period. The findings from this work package feeds in to the modeling and simulation activities.
Policy analysis and synthesis
The knowledge from the previous phases are integrated with the purpose of developing suggestion for activities and interventions that contribute to self-driving vehicles becoming a part of a future sustainable transport system.
Publications
System Level Impacts of Self-driving Vehicles Project Summary (pdf 875 kB)
- Albin Engholm, Ida Kristoffersson, Anna Pernestal, Impacts of large-scale driverless truck adoption on the freight transport system . Transportation Research Part A: Policy and Practice, 2021.
- A. Pernestål and I. Kristoffersson, 'Effects of driverless vehicles – Comparing simulations to get a broader picture', European Journal of Transport and Infrastructure Reserach, 2019(1).
- A. Pernestål Brenden and I. Kristoffersson, ‘Effects of driverless vehicles A review of simulations’ , Centre for Transport Studies, Working Paper CTS Working Paper 2018:11, 2018.
- A. Engholm, I. Kristoffersson, and A. Pernestål Brenden, ‘Is the driverless future sustainable? - Strategic uncertainties and system impacts’, 2018. (Under review, will be presented at WCTR 2019)
- A. Engholm, A. Pernestål, and I. Kristoffersson, ‘System-level impacts of self- driving vehicles: terminology, impact frameworks and existing literature syntheses’. (Report, available in Diva)
Research partner
Funding partner
